图
:material-circle-edit-outline: 约 960 个字 :fontawesome-solid-code: 41 行代码 :material-clock-time-two-outline: 预计阅读时间 4 分钟
图(Graph)
图表示多对多的关系
包含:
- 顶点 \(V\)(Vertex)
- 边 \(E\) (Edge):用顶点对 \((v,w)\) ,有向边表示为 \(<v,w>:v\rightarrow w\)
- 不考虑重边和自回路
完全图即最大边数情况
抽象数据类型定义
类型名称:图
数据对象集: \(G(V,E)\) 由非空有限顶点集合 \(V\) 和有限边集合 \(E\) 组成
typedef int Vertex;
typedef int WeightType;
typedef char DataType;
//Node of Edge
typedef struct ENode *PtrToENode;
struct ENode{
Vertex V1, V2;
WeightType Weight;
};
typedef PtrToENode Edge;
//Node of Graph
typedef struct GNode *PtrToGNode;
struct GNode{
int Nv; //num of vertex
int Ne; //num of edge;
WeightType G[MaxVertexNum][MaxVertexNum];
DataType data[MaxVertexNum]; //ignore it if with no data
}
typedef PtrToGNode MGraph; //matrix
操作集:
Create
MGraph Create(int Vnum){
Vertex V,W;
MGraph G;
G = (MGraph)malloc(sizeof(struct GNode));
G->Nv = Vnum;
G->Ne = 0;
for(V=0;V<G->Nv;V++)
for(W=0;W<G->Nv;W++)
G->G[V][W] = INFINTY;
return G;
}
InsertVertex
InsertEdge
void InsertEdge(MGraph G, Edge E){
G->G[E->V1][E->V2] = E->Weight;
G->G[E->V2][E->V1] = E->Weight;
}
DFS(深度优先遍历)
void DFS(Graph G, Vertex v);
BFS(宽度优先遍历)
void BFS(Graph G, Vertex v);
ShortestPath(最短路径)
void ShortestPath(Graph G, Vertex v, int Dist[]);
MST(最小生成树)
void MST(Graph G);
图的表示
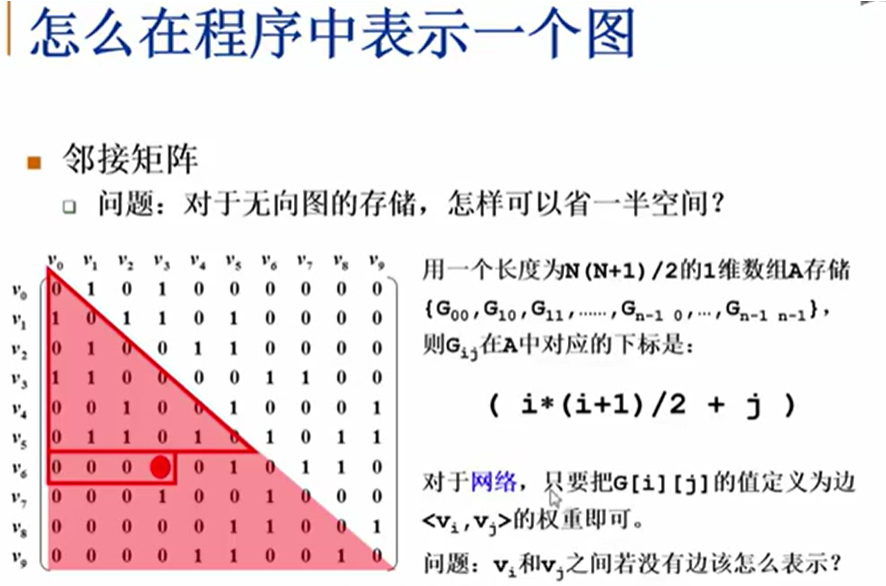
邻接矩阵 (Adjacency Matrixs)
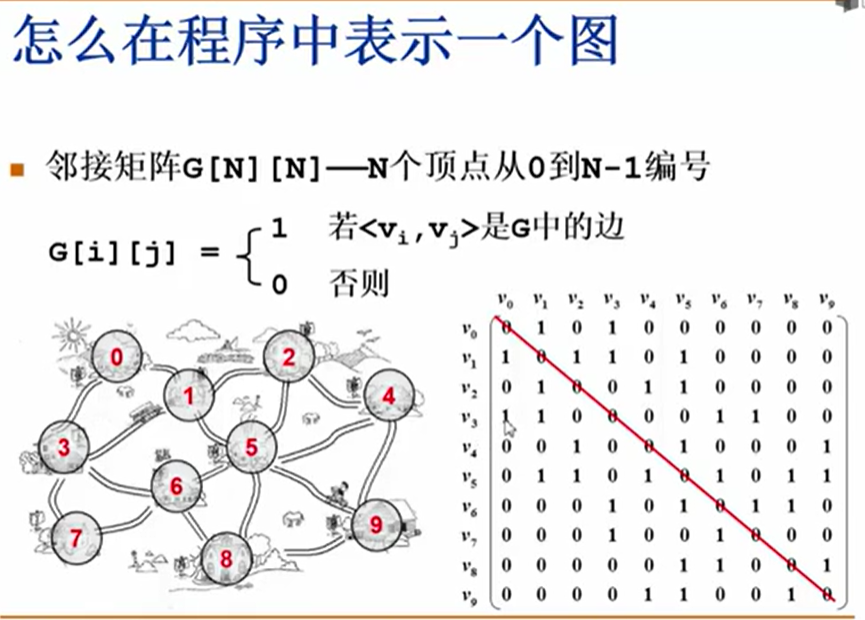
- 入度:指向该结点的边数
- 出度:从该结点出发的边数
对于有向图,行对应出度,列对应入度
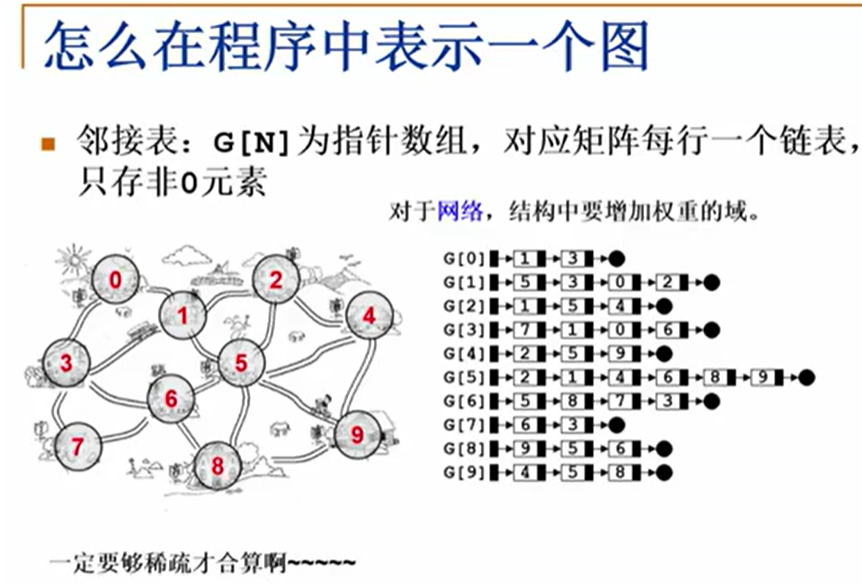
邻接表 (Adjacency Lists)
图的遍历
DFS(Depth First Search,深度优先搜索)
引入

这是一个迷宫,每个拐角有一盏灯,给了一个起点,需要去点亮每一盏灯。
先一条路走,一个一个点亮;每点亮一盏灯就检查周围的灯;若有没点亮的,就选择一个去点亮;若都点亮了,则原路返回;返回的路上也要依次再次检查。
复杂度
邻接表
考虑最坏情况,则每个节点对应N次,所有节点需要遍历E次,故 \(O(N+E)\)
邻接矩阵
考虑最坏情况,\(O(N^2)\)
BFS(Breadth First Search,广度优先算法)
类似Tree的level遍历
连通
两结点存在联通的路径即称为连通的。
- 路径长度:边数/权重和。
- 简单路径:路径经过的所有顶点均不同。
- 回路:起点终点一致。
- 连通图:图中顶点均连通。
- 连通分量:无向图的极大连通子图
- 极大顶点数:再加1个顶点就不连通了
- 极大边数
强连通
- 强连通:两顶点间存在双向路径
- 强连通图
- 强连通分量
- 对于一个孤立的顶点,可认为其本身是强连通的
最短路径问题(Shortest Path)
路径第一个顶点为源点(Source)
对后一个顶点为终点(Destination)
单源无权图
思路:按照递增顺序一个一个标记。利用BFS实现。
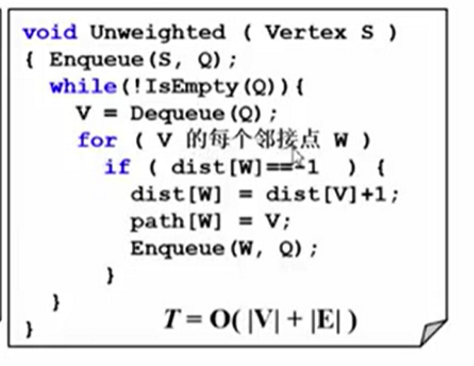
dist[W]= S到W的距离,dist[S] = 0path[W]= S到W路上,W的上一个顶点V
两者一般初始化为-1,
dist[W]==-1表示W未访问过
复杂度
\(T=O(V+E)\),访问了2V和1E
具体思路
类似BFS。
- 使用一个队列。首先压入源点。
- 弹出V,同时准备压入V指向的每个邻接点W。
- 对于每一个W,压入前需要检查是否被访问过(
dist[W]==-1)。 - 压入后更新dist(
dist[W]=dist[V]+1),更新path(path[W] = V)。
如此循环。
单源有权图
不讨论权值为负的情况
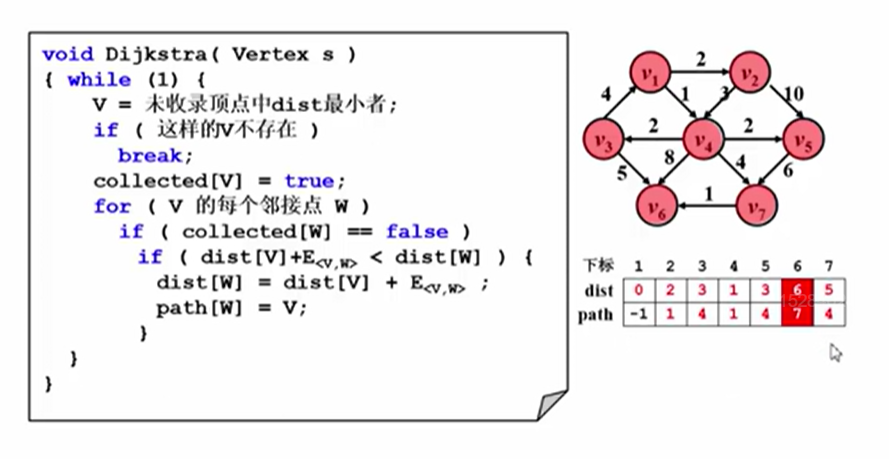
Dijkstra算法
思路和无权图类似,按递增顺序一个一个标记。
无法解决负值情况。
S:包含源点和所有确定了最短路径的顶点vdist:对于未收录于S的顶点V,dist表示源点到V的暂时的最短路径——仅经过S目前所包含的顶点。- dist 初始化为 infinity
每次从未收录的顶点中选一个dist最小的收录(贪心算法思想)
dist[W] = min{dist[W], dist[V]+<v,w>(权值)}
复杂度
这个问题不科学,取决于如何寻找未收录的顶点中选一个dist最小的
- 直接扫描所有未收录顶点(\(O(V)\)):\(T=O(V^2+E)\),对于稠密图效果好
- 将dist存储在最小堆(\(O(logV)\)):\(T=O(VlogV+ElogV) = T(ElogV)\),对于稀疏图效果好
- 等式是因为一般边多于顶点
多源最短路
- 直接将单源算法重复调用: \(T=O(V^3+EV)\),适合稀疏图
- Floyd算法:\(T=O(V^3)\)