Chapter 6: Process Synchronization
Background
对共享数据的并行操作可能造成不一致
我们需要进行进程同步
Shared-memory solution to bounded-buffer problem allows at most n–1 items in buffer at the same time.
因为是通过取余判断是否满的
关于生产者与消费者非原子操作的模型带来的问题(count 的汇编代码可能交叉重叠)
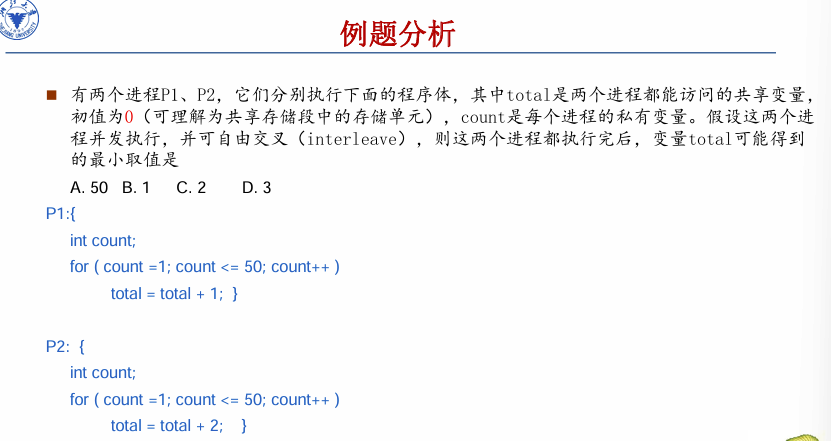
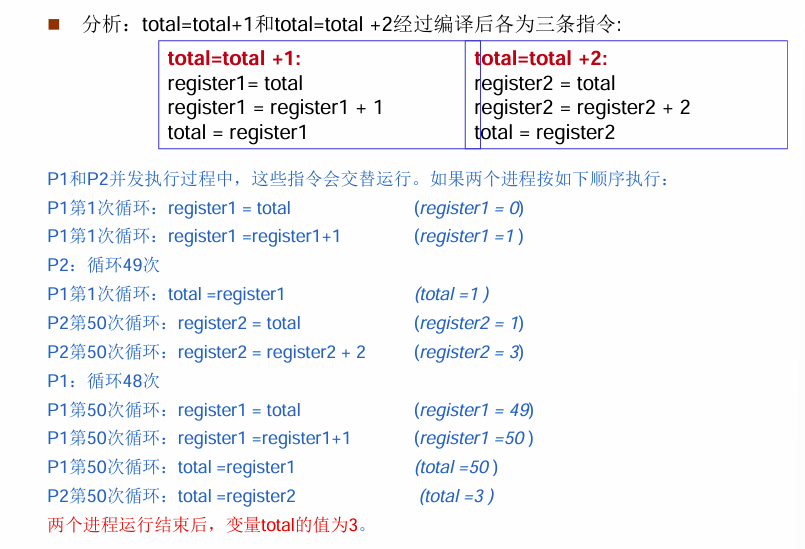
可见原子操作的重要性
Race Condition(竞争条件)
上面的例题就是一个竞争,发生竞争的条件就是 Race Condition,我们通过同步来避免 Race Condition
The Critical-Section Problem
临界资源是一次只允许一个进程使用(访问)的资源
竞争使用共享资源的进程,在每个进程内都设计一块代码叫 critical section(临界区),专门用于访问临界资源
do {
entry section //进入区
critical section //临界区
exit section //退出区
reminder section //剩余区
} while (1);
临界区规则
- Mutual Exclusion(互斥):临界资源在任意时刻只允许一个临界区访问,此时其它进程不得执行他们的临界区代码
- Progress(空闲让进):如果临界资源空闲,且有进程需要访问,则这些进程不能无限等待
- Bounded Waiting(有限等待):如果超过某个特定时间当前进程访问还没结束,那么必须换人访问
- 让权等待——不是必须的
- ????????这是什么
Synchronization Software
该算法用于解决两个进程的互斥,我们以下记为 \(P0\) 和 \(P1\)
假设 load 和 store 是原子的,即不能被中断
假设一次只能执行一条指令
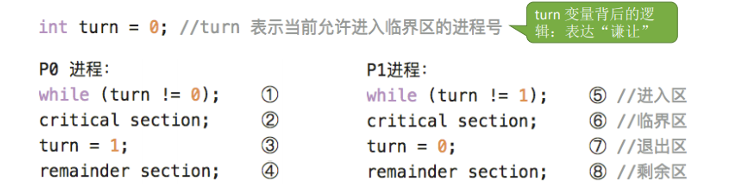
单标志法
就是在两个进程的临界区加一个共享 int 变量 turn,其值有 0 和 1,表示当前临界资源允许 \(P0\) 还是 \(P1\) 访问
turn 初始化为 0, \(P0\) 临界区操作时把 turn 置 1 , \(P1\) 临界区操作时把 turn 置 0
这个办法很简单,但如果是 \(P1\) 先执行就完了(如果不能并行执行进程)
而且是强制轮流访问,不太合理
双标志法
设置一个两位布尔变量数组 flag[2],初始化两位都是 false
哪个进程 ready to 访问临界资源就把哪位置 true,访问完再置 false
检查对面进程的位是否为 true,对方想访问就把资源让给对面,自己等待
根据检查位置分为两种
双标志前检查法
前检查是指先检查
flag再上锁(修改 flag)
初始化 flag [0] = flag [1] = false
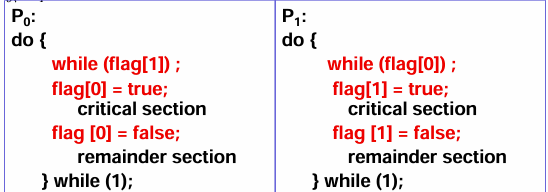
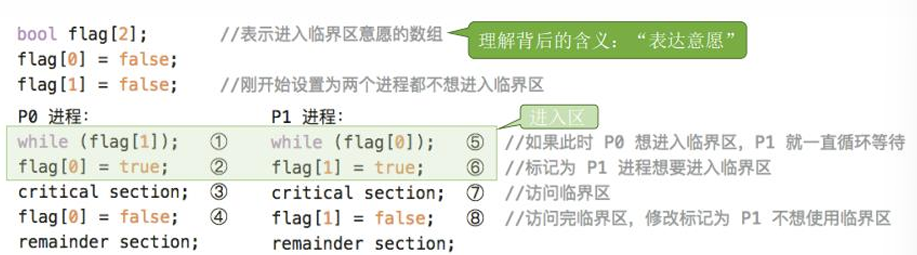
P0 和 P1 可能同时进入临界区,违反了互斥原则
双标志后检查法
初始化 flag [0] = flag [1] = false
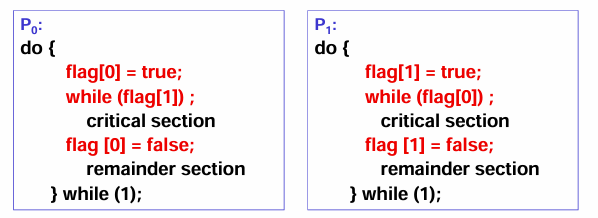
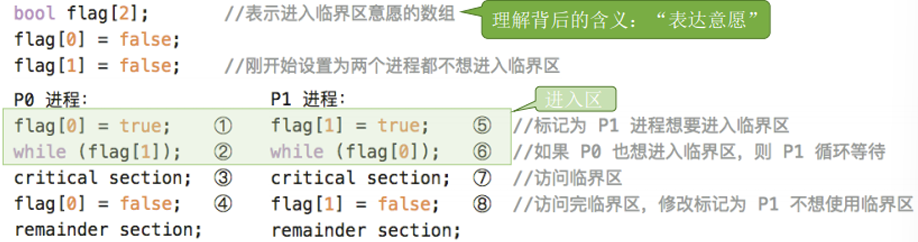
P0 和 P1 可能都进入不了临界区
P0 执行了 flag [0] := true ,然后 P1 执行了 flag [1] := true,这样两个进程都无法进入临界区
违反了空闲让进和有限等待,会出现饥饿问题
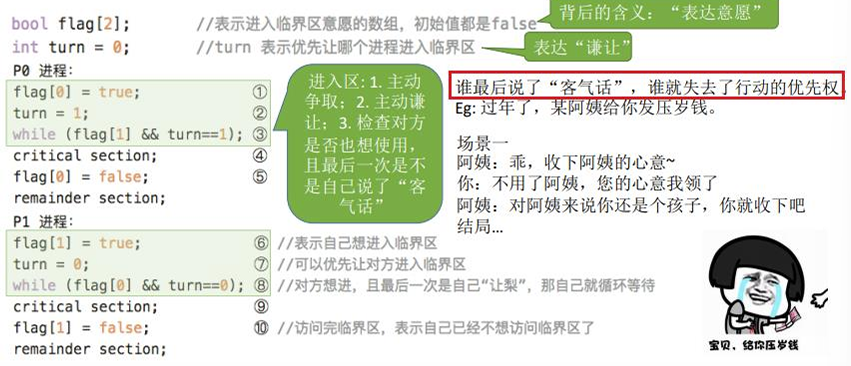
Peterson’s Solution
turn 和 flag[2] 都用上
flag表示哪个进程想访问turn表示哪个进程可以访问了
先用 flag 广播我想访问了,然后通过 turn “让”出访问机会给对面
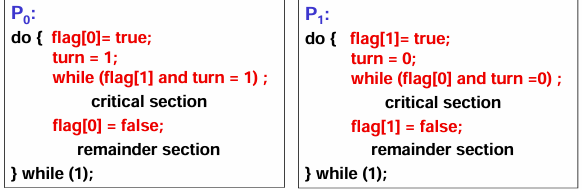
谁最后改了 turn,谁就把访问机会让给了对方,失去了访问机会
Meets all three requirements; solves the critical-section problem for two processes.
Bakery Algorithm (面包房算法)
又叫 lamport 算法
面包房买面包的排队步骤:
step1: 有 n 个顾客进入面包房买巧克力面条蒸蛋糕,安排他们按照次序在前台登记签到的号码,号码依次加 1.
step2: 根据签到号码由小到大的顺序依次进店买蛋糕。
step3: 完成购物的顾客在前台把自己的签到号码归 0。如果完成购买的顾客要再次进店需要重新排队。
原理
- 每个事件对应一个 Lamport 时间戳,初始值为 0
- 如果事件在节点内发生,时间戳加 1
- 如果事件属于发送事件,时间戳加 1 并在消息中带上该时间戳
- 如果事件属于接收事件,时间戳 = Max(本地时间戳,消息中的时间戳) + 1
//当前进程的进程号为i
do {
//number 默认为 0
choosing[i] = true; //表示进程i正在选号,可能会有同时选号号码一样的情况
number[i] = max(number[0], number[1], …, number [n – 1])+1;
choosing[i] = false;
//先和所有进程比号码大小
for (j = 0; j < n; j++){
//对方还在取号就先等他,可能是同号的
// 如果没有这第一个while,可能会出现 i 执行第二个while时number[j]还没被赋值,i发现number[j]是0就访问了,然后j过来判断是同号但j<i,这样j也去访问了,互斥了
while (choosing[j]) ;
while ((number[j] != 0) && (number[j],j) < (number[i],i)) ;
}
// number为0的表示没选号,就是不准备访问临界资源的,就不用管
//(number[j],j) < (number[i],i)) 满足其一即为True,顺序从左到右
//如果进程i号码大就需等待
//如果号码相等就让进程号小的优先
critical section;
number[i] = 0;
remainder section;
} while (1);
Synchronization Hardware
Test-and-Set(测试与设置)
硬件对同步的支持-TAS 和 CAS 指令 - 元思 - 博客园
TAS 是一个指令(也可以理解为一个函数),其接收一个指针
该指令包括两个子步骤,
- 把给定的内存地址设置为 TRUE(1)
- 返回修改前的值。
这两个子步骤在硬件上实现为一个 原子操作,执行期间不会被其他处理器打断。
诶 ☝️🤓,我设一个变量叫 lock,进程访问 critical section 前就先通过 while(TAS(lock)) 去 TSET 这个 lock; 访问的同时 SET 这个 lock,把门锁上,访问结束再 SET lock = false 不就行了
当一个进程欲访问已被其他进程锁定的资源时,进程循环检测该锁是否被释放,这种技术称为自旋锁(spin lock)。
Compare and Swap
CAS 和 TAS 逻辑差别不大,就是 TS 硬件换成了 Swap 硬件
while(1) {
key = TRUE;
while (key == TRUE)
Swap(&lock , &key);
critical section
lock = false;
remainder section
}
硬件方法优缺点
优点
简单
缺点
等待要耗费 CPU 时间,不能实现 "让权等待"
可能“饥饿”:从等待进程中随机选择一个进入临界区,有的进程可能一直选不上
可能 死锁:单 CPU 情况下, P1 执行特殊指令(swap)进入临界区,这时拥有更高优先级 P2 执行 并中断 P1, 如果 P2 又要使用 P1 占用的资源,按照资源分配规则拒绝 P2 对资源的要求,陷入忙 等循环。然后 P1 也得不到 CPU,因为 P1 比 P2 优先级低。
Bounded-waiting mutual exclusion with TAS
解决饥饿问题
Boolean waiting[n], lock ; //to be initialize to false, waiting[]:排队队列
while(1) {
waiting[i]=true;
key= true;
while ( waiting[i] && key ) key=TestAndSet(lock);
waiting[i]=false;
critical section;
//选择下一个进入临界区的进程,
//选择下一个waiting[j]=false
j= (i+1) % n ;
while ( (j != i) && !waiting[j] ) j= (j+1) % n ;
if (j == i) lock = false ;
else waiting[j] = false ;
remainder section ;
}
Review Question
- 有时钟中断,应尽量减少中断屏蔽
- 进程需要一直占用 CPU 检查自旋锁(循环等待)